Решения для автоматизации судовых электростанций
Решения для автоматизации судовых электростанций
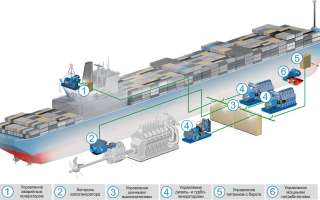
Компания ДВК-электро предлагает широкую линейку продукции DEIF для автоматизации электростанций различных судов. Конфигурация устройств возможна с лицевой панели контроллера или при помощи ПК и бесплатной сервисной утилиты USW3. В таблице ниже представлена продукция DEIF для решения различных задач:
Качественное обслуживание по всему миру
Компания DEIF предоставляет продукцию, консультации по разработке проекта для наиболее конкурентоспособной, безопасной и надежной эксплуатации судов. В основе автоматических систем управления заложена максимальная надежность и безопасность функционирования. Доступна служба технической поддержки в режиме 24/7/365.
Контроллеры для локальной АПС ДГ GPU3
Контроллеры для ГРЩ PPM3 , PPM300
Контроллеры для АРЩ GCU113
Безопасная и надежная эксплуатация
Компания ДВК-электро имеет собственный проектный отдел для комплексного решения задач автоматизации различных морских объектов. Основным критерием решения задач автоматизации морских объектов является безопасность и надежность. Мы помогаем нашим клиентам с подготовкой спецификации, разработкой документации по проекту, конфигурацией оборудования.
Контроллеры для ГРЩ DELOMATIC4 , PPM300
Контроллеры для АРЩ PPM300
Мониторинг и управление AGI400
Решения для проектов с динамическим позиционированием
Компания DEIF является лидером рынка в разработке систем для судов с динамическим позиционированием. Наши надежные и экономичные решения одобрены классификационными обществами для проектов DP-2 даже при работе с замкнутым секционным выключателем между ГРЩ. При этом обеспечивается достаточное быстродействие защит, включая ограничение мощности подруливающих устройств.
Контроллеры для ГРЩ PPM300
Контроллеры для АРЩ PPM300
Мониторинг и управление AGI400
Эффективная эксплуатация Ваших судов
Системы управления DEIF могут быть установлены и настроены на судне в минимальным сроки, а в некоторых случаях без фактического вывода судна из эксплуатации. Многократно проверенные и одобренные различными классификационными обществами алгоритмы управления позволяют сделать эксплуатацию судна безопасной, современной и надежной.
Рекомендуемая продукция:
Контроллеры для ГРЩ PPM3 , PPM300
Контроллеры для АРЩ PPM3 , PPM300
Мониторинг и управление AGI400
Полное соответствие требованиям заказчика
Компания DEIF имеет более 80 лет опыта разработки нового оборудования и участия в самых нестандартных проектах. Концентрируясь на конкретных требованиях заказчика, специалисты компании DEIF разрабатывают решение для комплексного управления, которое обеспечивает безопасную и надежную эксплуатацию.
Контроллеры для ГРЩ PPM300
Контроллеры для АРЩ PPM300
Мониторинг и управление AGI400
Простое и интуитивно понятное управление
Ограничение пространства для размещения оборудования является основной особенностью проектирования современных яхт. Система управления РРМ-3 разработана с учетом возможности размещения в небольших щитах управления и не требует установки дополнительного ПЛК.
Используя передовые алгоритмы управления и дублирование каналов связи, система обеспечивает организацию безопасного интуитивно понятного управления электростанцией.
Рекомендуемая продукция:
Контроллеры для ГРЩ PPM300
Контроллеры для АРЩ PPM300
Мониторинг и управление AGI400
Компания ДВК-электро проводит обучающие семинары по настройке и использованию контроллеров DEIF.
Автоматизация судовых энергетических установок
Автоматизация судов - это процесс в развитии судостроения, в результате которого различные функции управления судном и его оборудованием, ранее выполнявшиеся человеком, передаются техническим устройствам и приборам.
Автоматизация судовых энергетических установок (главных и вспомогательных), судовых электростанций, общесудовых систем и устройств позволяет повысить надежность и экономичность работы судового оборудования, продлить ресурс механизмов, улучшить условия труда плавсостава.
Все современные суда в зависимости от степени автоматизации энергетической установки делят на три группы.
К первой группе относятся суда, за исключением пассажирских, без вахты в машинном отделении и в центральном посту управления (ЦПУ). Регистр СССР присваивает этим судам знак автоматизации А1. Для краткости их иногда называют судами с безвахтенным обслуживанием машинного отделения. Ко второй группе относятся суда без вахты в машинном отделении, но с вахтой в ЦПУ. Регистр СССР присваивает им знак автоматизации А2. К третьей группе относятся суда с мощностью энергетической установки до 1500 кВт, объем автоматизации которых позволяет осуществлять эксплуатацию без вахты в машинном отделении. Суда старой постройки, находящиеся в эксплуатации, не имеют в символе знака автоматизации.
Основу автоматизации главной энергетической установки составляет система дистанционного автоматического управления (ДАУ). Все необходимые команды подаются с датчика дистанционного управления, расположенного в ходовой рубке. Исполнительными элементами, которые приводят в действие различные органы управления главного двигателя, являются электромеханические устройства (электромагниты, электродвигатели), пневматические или гидравлические, называемые сервоприводом. Дистанционным датчикам управления задается та или иная из команд; выполнение же ее осуществляется системой ДАУ автоматически по определенной программе. При этом контролируется возможность перегрузки главного двигателя и исправность отдельных узлов системы ДАУ.
Современные котельные агрегаты морских судов имеют автоматические системы регулирования питания и горения. Эти системы обеспечивают постоянство уровня воды в котле и давления пара, оптимальное количество воздуха, поступающего в топку. Иногда применяют и автоматическое регулирование температуры перегрева пара.
В настоящее время для управления главными судовыми дизелями применяют дистанционные системы различных типов. Система дистанционного автоматического управления обеспечивает выполнение следующих функций: пуск двигателя на заданную частоту вращения, сигнализацию о перегрузке двигателя; сигнализацию о работе в зоне критической частоты вращения; плавное изменение частоты вращения вала двигателя и устойчивое поддержание заданного режима в интервале от минимально устойчивой частоты вращения до частоты вращения полного хода; регистрацию поданных команд посредством реверсографа.
Дистанционное управление судовыми паротурбинными установками получило сейчас значительное распространение. В последнее время осуществлена система ДАУ, обеспечивающая дистанционное управление ГТЗА непосредственно из рулевой рубки. Одновременно сохраняется и возможность управления агрегатом из ЦПУ. Весь контроль за работой установки производится из ЦПУ, где находится вахтенный механик. Управление задатчиком частоты вращения турбины производится из рулевой рубки посредством электрогидравлической следящей системы.
Автоматизация главной энергетической установки, кроме системы ДАУ, предусматривает дистанционный пуск и остановку из ЦПУ вспомогательных механизмов, обслуживающих главные двигатели, автоматический пуск резервного масляного насоса при понижении давления в системе смазки, дистанционное или автоматическое пополнение баллонов пускового воздуха и воздуха для питания средств автоматизации, автоматический пуск резервного насоса питания гидравлических устройств автоматизации при понижении давления, автоматическое регулирование температуры воды, масла и топлива на входе в двигатель, в расходных цистернах и при сепарировании. На судах со знаком автоматизации А1 предусматривается автоматический ввод в действие всех резервных вспомогательных механизмов, связанных с ходом судна, при выходе из строя основных. Энергетическая установка автоматизированного судна оборудуется системой централизованного контроля параметров и аварийно-предупредительной сигнализацией.
Системы управления судовыми энергетическими процессами
Изложены теоретические вопросы, отражающие основные положения, принципы построения систем автоматизированного управления главными и вспомогательными энергетическими установками рыбопромысловых судов. Рассмотрены вопросы математического моделирования и разработки алгоритмов функционирования судовых типовых систем управления объектами автоматизации.Описаны современные системы автоматического управления движением судов по курсу и рыбопромысловым оборудованием с использованием аппаратно-программных средств микропроцессорной техники, а также изложены вопросы автоматизации систем управления главными и вспомогательными энергетическими установками рыбопромысловых судов.В учебнике представлены основные требования Правил Российского морского регистра судоходства, а также Правил эксплуатации систем и устройств автоматизации на судах флота рыбной промышленности Российской Федерации.Содержание учебника направлено на формирование компетенций в соответствии с требованиями ФГОС ВО, по специальности 26.05.07 «Эксплуатация судового электрооборудования и средств автоматики».Для курсантов и студентов высших морских учебных заведений, а также может быть полезен для судовых электромехаников и механиков.ОглавлениеУсловные обозначения Введение Глава 1. Комплексная автоматизация судов флота рыбной промышленности 1.1. Современное состояние и перспективы развития судовых систем автоматизации технических средств судна 1.1.1. Государственная политика по обновлению и автоматизации рыбопромыслового флота 1.1.2. Современное состояние и перспективы автоматизации технических средств судна 1.2. Технико-экономические и социальные аспекты внедрения комплексной автоматизации судов 1.3. Проблемы комплексной автоматизации судов флота рыбной промышленности 1.4. Требования Правил Морского регистра судоходства РФ и Международной конвенции ПДНВ-78/95 1.4.1. Требования Международной конвенции ПДНВ-78/95 к несению вахты 1.4.2. Требования Правил Морского регистра судоходства РФ к судовым системам автоматизации 1.4.2.1. Общие требования 1.4.2.2. Требования к элементам и устройствам 1.4.2.3. Системы автоматизированного управления 1.4.2.4. Системы аварийно-предупредительной сигнализации, защиты, индикации и регистрации 1.4.2.5. Системы защиты 1.4.2.6. Системы индикации и регистрации 1.5. Требования к автоматизации судов в символе класса 1.5.1. Требования к автоматизации судов со знаком AUT1 в символе класса 1.5.2. Требования к автоматизации судов со знаком AUT2 в символе класса 1.5.3. Требования к автоматизации судов со знаком AUT3 в символе класса 1.6. Требования Морского регистра судоходства РФ к компьютерам и компьютерным системам 1.6.1. Общие технические требования 1.6.2. Проверка функционирования, самоконтроль и сигнализация о неисправностях в компьютерных системах 1.7. Требования к судам на соответствие требованиям ECO и ECO-S Вопросы и задания для самопроверки по Главе 1 Литература Глава 2. Математические основы анализа и синтеза логических устройств судовых систем автоматического управления 2.1. Конечные автоматы и способы их задания 2.2. Микропрограммные автоматы и способы их задания 2.3. Синтез логических устройств судовых систем управления 2.4. Методы программной реализации логических устройств Вопросы и задания для самопроверки по Главе 2 Литература Глава 3. Системы автоматического управления движением судна по курсу и промысловым оборудованием 3.1. Современное состояние и перспективы развития автоматических систем управления движением судна 3.2. Назначение, состав, структура, функции системы управления движением судна по курсу 3.3. Требования Правил Морского регистра судоходства, предъявляемые к судовым автоматизированным электроприводам 3.4. Принцип действия, состав, структура, функции авторулевых «Аист» и HSA III 3.5. Принцип действия и классификация адаптивных авторулевых 3.6. Современное состояние и перспективы развития систем управления судовым промысловым оборудованием 3.6.1. Назначение, состав, структура и технические требования к системам автоматизированного управления судовыми приводами траловых и ваерных лебедок 3.6.2. Принципы построения и элементная база систем управления электроприводов ваерных лебедок 3.6.3. Назначение, состав, функции гидравлической ваерной лебедки 3.6.4. Управление силовыми гидросистемами судовой ваерной лебедки Вопросы и задания для самопроверки по Главе 3 Литература Глава 4. Системы автоматизированного управления дизель-генераторами и режимами работы судовых элек-тростанций 4.1. Дизель-генератор как объект автоматизации 4.1.1. Статические свойства дизеля как объекта управления частотой вращения вала 4.1.2. Динамические свойства дизеля как объекта управления частотой вращения 4.2. Требования Правил Морского регистра судоходства, предъявляемые к системам автоматизации дизель-генераторных агрегатов 4.3. Требования Правил эксплуатации систем и устройств автоматизации, предъявляемые к приводным двигателям дизель-генераторных агрегатов 4.4. Работа основных контуров дизель-генератора 4.4.1. Работа контура поддержания дизеля в состоянии горячего резерва 4.4.2. Работа контура пуска дизель-генератора 4.4.3. Работа контура остановки дизель-генератора 4.4.4. Реализация функций защиты дизель-генератора 4.5. Системы дистанционного автоматизированного управления дизель-генераторами 4.5.1. Дистанционное автоматизированное управление дизель-генераторным агрегатом на этапе пуска 4.6. Классификация и структура систем управления судовыми энергетическими системами 4.6.1. Классификация и особенности функционирования судовых электростанций 4.6.2. Требования Правил Морского регистра судоходства к автоматизированным судовым электростанциям 4.6.3. Автоматизация процессов управления судовыми электроэнергетическими системами Вопросы и задания для самопроверки по Главе 4 Литература Глава 5. Автоматизированные системы управления вспомогательными механизмами и устройствами судовой энергетической установки 5.1. Назначение, состав, структура, функции систем управления вспомогательными механизмами судовой энергетической установки 5.2. Требования Правил эксплуатации, предъявляемые к системам управления насосами 5.3. Анализ существующих методов и средств управления вспомогательными механизмами судовой энергетической установки 5.3.1. Судовая МПСУ Data chief-7 5.3.2. Судовая микропроцессорная система управления Data chief-C20 5.3.3. Система управления AST 5011 вспомогательными механизмами энергетической установки судов проекта 488 типа «Моонзунд» 5.4. Алгоритмы функционирования вспомогательных механизмов и устройств судовой энергетической установки Вопросы и задания для самопроверки по Главе 5 Литература Глава 6. Системы дистанционного автоматизированного управления судовыми главными двигателями 6.1. Главный двигатель как объект автоматизации 6.1.1. Требования Правил Регистра и Правил эксплуатации судовых средств автоматизации, предъявляемые к главным двигателям 6.1.2. Требования Правил Регистра к двигателям внутреннего сгорания 6.1.3. Требования Правил Регистра к системам дистанционного автоматизированного управления главными энергетическими установками 6.1.4. Требования Правил эксплуатации к системам ДАУ главными двигателями и винтами регулируемого шага 6.2. Основные функции, выполняемые системами дистанционного автоматизированного управления главными двигателями 6.3. Классификация систем ДАУ ГД с ВРШ и основные режимы работы 6.3.1. Требования к системам управления 6.3.2. Типы систем дистанционного управления и принципы их построения 6.3.3. Классификация систем ДАУ 6.3.4. Принципы построения и структура систем ДАУ 6.3.5. Характеристики пуска и реверса при автоматизированном управлении 6.3.6. Анализ характеристик функционирования главного двигателя в режиме пуска 6.3.7. Программы управления скоростью главного двигателя 6.3.8. Маневренные характеристики судна 6.4. Анализ режимов работы систем дистанционного автоматизированного управления главных двигателями 6.4.1. Назначение, состав, структура, функции системы ДАУ ГД с ВРШ AutoChief-7.0 6.4.2. Анализ режимов работы системы ДАУ ГД и алгоритмы предварительной подготовки к пуску, пуска, остановки 6.4.3. Анализ режимов работы системы ДАУ ГД и алгоритмы работы системы ДАУ ГД с ВРШ в комбинаторном режиме, режиме отдельного управления оборотами ГД, режимах постоянных оборотов 6.4.4. Система дистанционного автоматизированного управления главным двигателем АFD III/2 6.4.5. Система дистанционного автоматизированного управления главным двигателем FAHM-S 6.4.6. Система дистанционного автоматизированного управления главным двигателем AFA-1 6.4.7. Микропроцессорные системы дистанционного автоматизированного управления главными двигателями промысловых судов 6.4.7.1. Система дистанционного автоматического управления судовой силовой установкой с дизель-редукторным агрегатом «ВИКМАТИК» 6.4.7.2. Система ДАУ ГД Neptune-II Propulsion Control System 6.4.7.3. Система ДАУ ГД PCS 2200 6.5. Математические модели динамики комплекса «главный двигатель — винт — корпус судна» 6.5.1. Уравнения динамики объекта управления 6.5.2. Уравнения динамики управляющих устройств 6.5.3. Уравнения динамики системы ДАУ ГД 6.5.4. Моделирование комплексов «главный двигатель — винт — корпус судна» с использованием математического пакета MatLab 6.5.4.1. Моделирование поведения комплекса «главный двигатель — винт регулируемого шага- корпус судна» 6.5.4.2. Моделирование поведения комплекса «главный двигатель — винт фиксированного шага — корпус судна» Вопросы и задания для самопроверки по Главе 6 Литература Список литературы Глоссарий Нормативно-справочные материалы Обо всём этом и не только в книге Системы управления судовыми энергетическими процессами (М. Прохоренков А.М.)
Средний балл:
Рецензий на книгу «Системы управления судовыми энергетическими процессами» пока нет. Уже прочитали? Напишите рецензию первым
Средний балл:
Отзывов о книге «Системы управления судовыми энергетическими процессами» пока нет. Оставьте отзыв первым
Цитат из книги «Системы управления судовыми энергетическими процессами» пока нет. Добавьте цитату первым
Автоматизированные системы управления судовыми дизельными энергетическими установками (АСУ СДЭУ) Иллюстрационный материал к лабораторным работам для студентов. — презентация
Презентация на тему: » Автоматизированные системы управления судовыми дизельными энергетическими установками (АСУ СДЭУ) Иллюстрационный материал к лабораторным работам для студентов.» — Транскрипт:
1 Автоматизированные системы управления судовыми дизельными энергетическими установками (АСУ СДЭУ) Иллюстрационный материал к лабораторным работам для студентов специальности «Эксплуатация судовых энергетических установок» Разработал: Малахов И.И. Омский институт водного транспорта (филиал) ФГОУ ВПО «НГАВТ» 2009 г.
2 Автоматическое регулирование – поддержание постоянным или изменение по заданному закону некоторой величины, характеризующей процесс, осуществляемое путем определения состояния объекта или действующих на него возмущений и воздействия на регулирующий орган объекта. Автоматическая система регулирования любой сложности состоит из управляемого объекта и автоматического управляющего устройства, взаимодействующих между собой. Управляемый объект – техническое устройство, осуществляющее технический процесс, который нуждается в оказании специально организованных воздействий извне на исполнительный орган объекта для выполнения его алгоритма функционирования. К управляемым объектам можно отнести само судно, энергетическую установку, ГД, ДГ и др.
3 Воздействия – величины, характеризующие влияние, оказываемое на объект извне. Управляющие воздействия – это воздействия вырабатываемые управляющим устройством (или задаваемые человеком). Возмущающие воздействия – это воздействия не зависящие от системы управления. Могут быть двух видов: нагрузки и помехи. Задающие воздействия – это воздействие содержащее информацию о требуемом значении управляемой величины. Управляемая величина – физическая величина, характеризующая процесс, требуемое значение которой необходимо получить в результате управления.
4 В функциональной схеме система разбита на элементы исходя из выполняемых ими функций, т.е. назначения. Элемент автоматики – простейшая конструктивно-целостная ячейка системы, предназначенная для выполнения операций с сигналом (преобразование, усиление и пр.). С 1, С 2 – сельсины; МУ – магнитный усилитель; ОУ 1, ОУ 2 – обмотки управления; ЭМУ – электромашинный усилитель; ИД – исполнительный двигатель; МП – механическая передача. g – задающее воздействие (поворот штурвала); θ 1 – управляющее воздействие (поворот вала ИД); θ 2 – управляемая величина (поворот баллера руля); U 1 – напряжение на обмотках управления; U 2 – напряжение на выходе из МУ; E S – э.д.с. наводимая ЭМУ.
5 W 2 (p)W 3 (p)W 4 (p)W 5 (p)W 1 (p) W 4 (p) gεU1U1 U2U2 EsEs θ 1 θ1θ1 θ2θ2 θ2θ2 MНMН С1С2С1С2 МУЭМУИДМП В структурной схеме система разбита на звенья исходя из их математического описания. Динамическое звено – искусственно выделяемая часть автоматической системы, описываемая уравнением определенного вида. Динамическое звено может не иметь физического смысла, а лишь отражать какую-либо математическую зависимость между некоторыми величинами элемента. g – задающее воздействие (поворот штурвала); ε – ошибка (рассогласование g и θ 2 ); U 1 – напряжение на входе в МУ; U 2 – напряжение на обмотках управления; θ 1 – необходимый угол поворота ИД; θ 1 – угол на который не довернется ИД из-за момента сопротивления; М Н – момент нагрузки на валу ИД (возмущающее воздействие); θ 1 – управляющее воздействие (поворот вала ИД); θ 2 – управляемая величина (поворот баллера руля); E S – э.д.с. наводимая ЭМУ.
6 В ТАУ используются две аналитические формы представления динамических характеристик: дифференциальные уравнения; передаточные функции. Передаточная функция звена – это отношение выходного параметра к входному, представленное в операторном виде. W(p) FY Y = W(p) · F
7 Переходная, или временная характеристика (функция) звена представляет собой реакцию на выходе звена, вызванную подачей на его вход единичного ступенчатого воздействия Единичное ступенчатое воздействие (единичная ступенчатая функция) – это воздействие, которое мгновенно возрастает от нуля до единицы и далее остается неизменным Единичное ступенчатое воздействие обозначается 1(t) и может быть описано следующим равенством Simulink –> Sources –> Step t h 0 1(t)
8 Частотные характеристики описывают установившиеся вынужденные колебания на выходе звена, вызванные гармоническим воздействием на входе Если на вход звена направленного действия подано гармоническое воздействие где x max – амплитуда, а – угловая частота этого воздействия то по окончании переходного процесса на выходе звена будут существовать гармонические колебания с той же частотой, что и входные колебания, но отличающиеся в общем случае по амплитуде и фазе, т.е. в установившемся режиме выходная величина звена где y max – амплитуда выходных установившихся колебаний; – фазовый сдвиг между входными и выходными колебаниями Амплитудно-частотная характеристика (АЧХ) выражает отношение амплитуды колебаний на выходе звена к амплитуде колебаний на его входе в зависимости от частоты выходного сигнала Фазово-частотная характеристика (ФЧХ) выражает зависимость разности фаз между входными и выходными колебаниями звена от частоты входного сигнала
9 Усилительным (пропорциональным) называют звено, у которого выходная величина в каждый момент времени пропорциональна входной величине. Уравнение усилительного звена Передаточная функция усилительного звена Simulink –> Math Operations –> Gain
10 Апериодическим (инерционным) называют звено, в котором при подаче на вход ступенчатого сигнала выходная величина апериодически (по экспоненте) стремится к новому установившемуся значению Уравнение апериодического звена Передаточная функция апериодического звена Simulink –> Continuous –> Transfer Fcn где Т – постоянная времени звена, характеризующая инерционность звена, с; k – коэффициент усиления звена
11 Колебательным называют звено, у которого при ступенчатом изменении входной величины выходная величина стремится к новому установившемуся значению, совершая при этом колебания Уравнение колебательного звена Передаточная функция колебательного звена где T 1 и T 2 – постоянные времени колебательного звена; k – коэффициент усиления колебательного звена Simulink –> Continuous –> Transfer Fcn Постоянные времени колебательного звена T 1 и T 2 связаны зависимостью Коэффициент называют коэффициентом колебательности и, судя по названию, он характеризует колебательность переходного процесса колебательного звена. Если
12 Интегрирующим называют звено, в котором выходная величина пропорциональна интегралу во времени от входной величины Уравнение интегрирующего звена Передаточная функция интегрирующего звена Simulink –> Continuous –> Integrator
13 Дифференцирующим называют звено, в котором выходная величина пропорциональна производной по времени от входной величины. В дифференцирующем звене выходная величина пропорциональна скорости изменения входной величины Уравнение дифференцирующего звена Передаточная функция дифференцирующего звена Simulink Extras –> Linearization –> Switched derivative for linearization
14 1.Дать определение основным понятиям ТАУ: автоматическое регулирование, управляемый объект, управляемая величина, управляющие воздействия, возмущающие воздействия, задающие воздействия. 2.Особенности функциональной схемы САУ. Как составляется. 3.Особенности структурной схемы САУ. Как составляется. 4.Определение передаточной функции звена. 5.Переходная характеристика звена. Определение. 6.Единичное ступенчатое воздействие. Определение, график. 7.Частотные характеристики звена. Определение. 8.Амплитудно-частотная характеристика звена. Определение. 9.Фазово-частотная характеристика. Определение. 10.Усилительное звено. Уравнение, передаточная функция, представление в MATLAB. 11.Апериодическое звено. Уравнение, передаточная функция, представление в MATLAB. 12.Колебательное звено. Уравнение, передаточная функция, представление в MATLAB. 13.Интегрирующее звено. Уравнение, передаточная функция, представление в MATLAB. 14.Дифференцирующее звено. Уравнение, передаточная функция, представление в MATLAB.